

Model No. 41

Back to home page
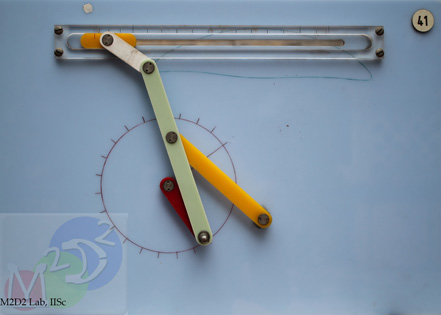
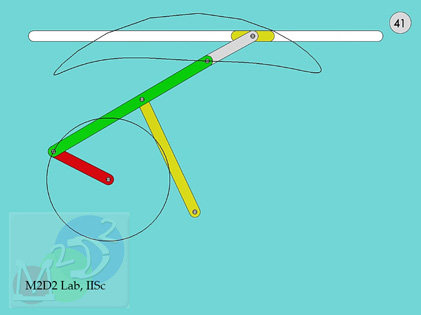
A Stephenson’s Type-III linkage for converting rotary motion of a crank into translatory sliding motion with a quick-return ratio.
Physical model
Digitized model

Position 1
Position 2
1 - 2
<
>
Click to go to Solidworks files of this model
Follow us on Youtube !
Click the button below.


