Mechanical Engineering, Indian Institute of
Science, Bangalore 560 012, India Optimization hinders evolution! ME256
Variational Methods and Structural Optimization
Jan.-May., 2019
Instructor:
G. K.
Ananthasuresh
, Room 106, ME Building,
suresh at
mecheng.iisc.ernet.in
Lectures: Tu, Th: 08:30 AM - 10:00 AM;
Venue: ME MMCR
Homework #5
Assigned: Feb. 16th, 2019
Due: Feb. 26th, 2019
Points: 80 Additional points for work that is beyond instructor's expectation!
Look up
Homework #1 of 2010 offering of this course and the
solution
posted there to know what is meant by "beyond instructor's expectation".
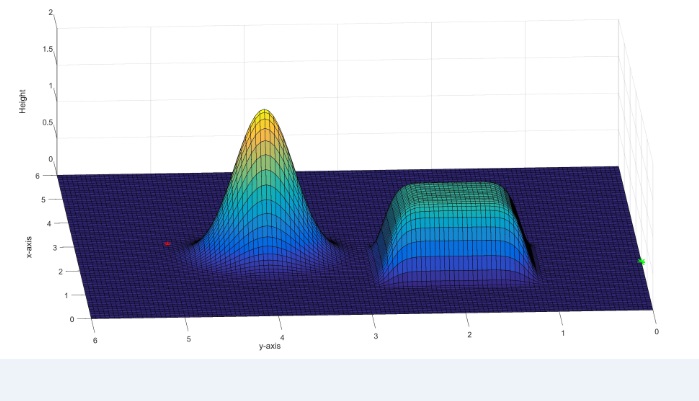
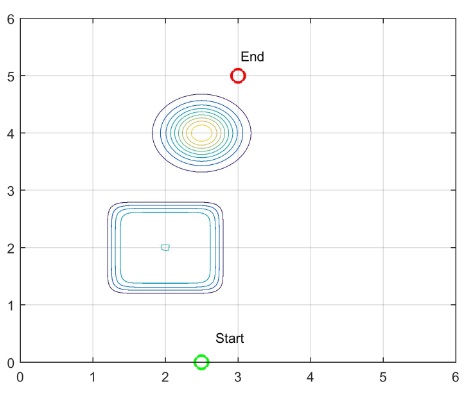
80 points
Path planning for a planar mobile robot can be posed as a calculus of variations problem using a potential function and computing a geodesic on it. Use the Matlab code to define a fictitious height function to model obtacles of generalized elliptical shapes within a domain. Two such shapes are shown in the figures below in the Z(X,Y) height function and its contours in a plane. Use fmincon to find the geodesic. Submit your problem formulation, code, and the geodesic path in 3D and 2D-contour figures.