
Mechanisms, Design and Optimization
Research in mechanisms and design has been pursued in the Department for a few decades and is still active. It is worth noting that the Centre for Product Design and Manufacturing (CPDM) in IISc took shape primarily from the Department faculty who work in this area. Several faculty members hold secondary appointments in CPDM and undertake product design projects. Even after this ‘spinoff’ centre was initiated, research in engineering design aspects continues in mechanical engineering. Geometric modeling and Computer-Aided Design (CAD), kinematics from the viewpoint of geometry, compliant mechanisms, and topology optimization are currently active topics in the Department.
Research in the area of CAD has delved on representation of and reasoning with 3D models by Prof. B. Gurumoorthy’s group. While his earlier work focused on feature-based modelling and construction of 3D geometry from measured point data, the fo cus has shifted in the last five years towards the problems of capturing non-geometric product information in representation and reasoning with mesh-based representation. Prof. Dibakar Sen’s group studies multi-body contacts from the geometric perspective rather than that of algebra and considers both theoretical kinematics aspects and practical applications. On the theoretical side, for example, automatic generation of kinematic constraints is studied using modular kinematics approach. One of the practical applications his group had recently invested efforts in is the design of circuit breakers for a company. Prof. G.K. Ananthasuresh’s group works extensively on compliant mechanisms. Design methods, non-dimensional analysis, unconventional actuation, and a variety of multidisciplinary applications of compliant mechanisms at macro, meso, and micro scales are investigated. Topology optimization has been used to design compliant mechanisms, tensegrity structures, and de novo proteins. Lately, topology derivative-based method combined with level-set approach is being investigated for devising computationally efficient methods for additive manufacturing of structures in collaboration with industrial partners.
Geometric approach to kinematics
Mechanisms are fundamental building blocks in the construction of devices that use mechanical movements for their function. The interest of Prof. Sen’s group in this field covers primarily kinematics from a geometric rather than an algebraic perspective. Questions pertaining to what motions are permissible when two smooth manifolds are in contact constitute a part of their study in theoretical kinematics. Computational kinematics needs rigorous mathematical treatment. One of the key explorations has been to examine how to make this process less tedious. Modular kinematics, which is about decomposition of a system in terms of predefined patterns and automated kinematic assembly, which is about automatic generation of kinematic constraints through geometric compatibility of the forms in contact, are fundamental topics of interest to the group.
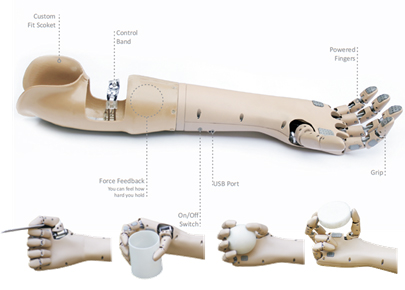
PURAK: The underactuated transradial prosthetic arm with myomechanical control and grasp-force feedback system.
These two techniques together enable intuitive modeling and automated determination of the kinematic states of a mechanical system. This interest in creative applications of mechanisms has resulted in several patented or patent-pending products, e.g. dialysis chair, underactuated prosthetic hand with haptic feedback, haptic array systems, cotton-plucking machine, multifunction wheelchair, etc.
Compliant mechanisms
“How does one design an elastically deformable body for desired behavior in multi-disciplinary situations?” is the main question addressed by Prof. Ananthasuresh’s research. The group works on compliant mechanisms (which are joint-less elastically deformable structures), miniature mechanisms (as in micro-electro-mechanical systems, MEMS), proteins, tools for mechanical characterization of biological cells, and numerous micro-sensors, actuators, devices, and systems that span multiple size-scales and applications in multiple dis ciplines. The common ground for all these is the novel concept of unitized elastic body optimally shaped for desired functionality.
Posing novel synthesis and inverse problems related to compliant mechanisms and solving them for practical applications underscore the group’s activities. One of their recent works (A bilateral relationship between stable profiles of pinned–pinned bistable shallow arches, International Journal of Solids and Structures, 143, 183-193) is an example. This work is fundamental in nature in that it gives rise to an analytical relationship that makes the design of bistable arches straightforward. Four practical applications are supported by this mechanics study: a two-terminal RF MEMS switch, a chair for the elderly and arthritics, miniature circuit-breakers, and a self-offloading diabetic footwear. Each application leads to a new facet of designing elastically deformable continuum and enriches the field of compliant mechanisms.
Prof. Ananthasuresh’s lab has a display of nearly 100 compliant mechanisms, each with unique functionality. This is a result of conscious effort to emulate the famous rigid-body mechanism collection of Franz Reuleaux, a 19th century kinematician. The group is creating non-dimensional kinetoelastic maps for these 100 designs, classified according to function, so that any designer can easily use them at any size, material, and manufacturing process.
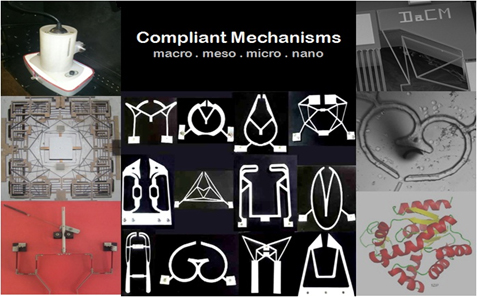
Compliant mechanisms at multiple scales and multiple domains.
Modelling of heterogeneous objects
CAD models typically represent the material information as an annotation in the model. While this works well when the object is of a homogeneous material, not having the material information integrated with geometry can cause problems when the object is composed of different materials. Such heterogeneous objects are increasingly used to achieve multiple and often conflicting behaviour within a single object. These objects are entities whose material composition or structure varies over the volume resulting in a spatial variation of properties. They may consist of a combination of homogenous chunks of multiple materials (discrete heterogeneous objects) or they may be composed of a combination of multiple materials where the proportion of each material in the mix varies smoothly across the object domain (smooth heterogeneous objects).
A hybrid approach to define and represent the material variation from inside to outside for heterogeneous objects has been developed. The Medial Axis Transform (MAT) of the object is used to capture user’s design intent in terms of material distribution. The user can specify the desired material attributes in multiple ways: define material composition on the rail (line between a point on the medial axis and its foot-point) or use MAT and boundary as material reference feature. This method overcomes the limitation of existing evaluated and unevaluated models.
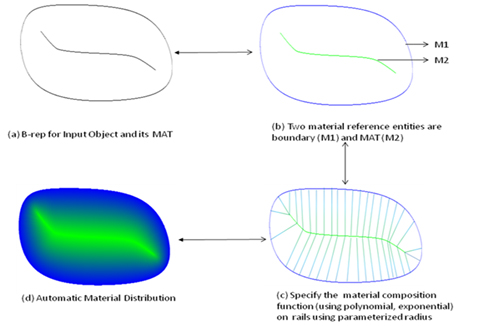 Schematic process of heterogeneous object modelling.
Schematic process of heterogeneous object modelling.
Evaluated models need exhaustive subdivision to approximate the desired material gradation that results into large memory size, inefficient material interrogation and difficult-to-edit material gradation. Unevaluated models are constrained by the limited number of material functions for modelling. The proposed method achieves the best of both worlds by subdividing the manifold geometry into simpler symmetric regions so that existing material function from unevaluated models can be used to define the desired material distribution in such regions. Thus, it uses subdivision (or evaluated) and functional (or unevaluated) representation simultaneously in a hybrid representation.
Local symmetry inherent in the MAT and relationship between the object boundary and the MAT point have been used to achieve both intuitive variation of material composition, local control over the same, and compact data structure. A material evaluation scheme has been proposed to evaluate the material composition at any given location in the object. Heterogeneous objects modeled with this scheme are shown in results depicting the variant material distribution like inside to outside and vice-versa. This representation is general to any object because of the unique existence of MAT for all objects.
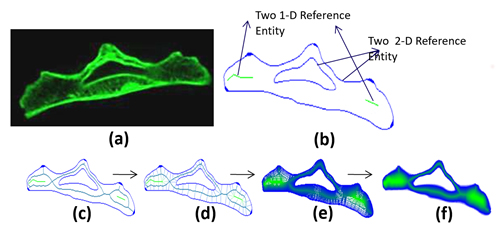
(a) CT scan slice of sacrum (b) Four material reference entities defined; (c), (d) and (e) Adaptive subdivision of rails and tracks; (f) Resultant distribution.
The use of hybrid representation is extended into a general method for modelling wide range of heterogeneous objects which may be associated with complex material variation over complex geometry. Heterogeneous objects like composites and naturally occurring objects (bones, rocks, meteorites) are often associated with random and irregular material distribution. Modelling such objects is desired for analysis and manufacture of implants, tools, etc. The source of the random and irregular material distribution is represented by mixed-dimensional entities, inclusive of non-manifold entities. MAT is used to segment the domain into independent regions, each corresponding to the region of influence of these material reference features. The material distribution over each such region can be intuitively prescribed starting from the material reference entity and terminating at the medial axis segment bounding the corresponding region. The spatial variation of the material is captured by a parameterized distance field from the material reference entity. These regions are stored using the neighborhood relation for efficient material evaluation for a given geometric location.
Additive Manufacturing (AM) is preferred over any other techniques for functional graded materials. The proposed modeling technique is integrated with path planning for a canonical AM process. An iso-material contour representation is proposed to automatically generate the process plan (deposition path and deposition details). These iso-material contours serve as deposition site. The construction of the paths ensures that they are along the direction of the material blending, thereby avoiding the staircase effect of the normal raster scan. As the paths are iso-material by construction, the frequent switch across different nozzles are avoided, thereby reducing the over-deposition or under-deposition due to the start and stop of these nozzles. These iso-material contours are associated with the designed material features which automatically propagate any change in material feature design to the process plan.
Mesh-based representation
Over the last several years, triangle meshes have become an increasingly popular shape representation. Initially, meshes were used only for visualization and transmission of shape models. Given the ease of standardization and the proliferation of devices (scanners, range images) that capture and output shape information as meshes, this representation is now used in product design and development in simulation, analysis and prototyping, and virtual reality interfaces.
Manipulation of mesh models involves annotation, interactive viewing, slicing, re-meshing, mesh optimization (achieving optimal number of triangles), mesh segmentation, simplification and editing. Of these, editing has received the least attention. Mesh model often requires editing either locally or globally based on the process requirement. Local editing affects only a part of the mesh model typically corresponding to features in the part, whereas global editing modifies whole mesh model. For product design and manufacturing, local editing of a mesh model implies editing of volumetric features present in that model based on feature parameters, whereas global editing implies editing a mesh model based on global parameters. Algorithms have been developed for pre-processing mesh models for editing and to extract features in a mesh model to enable feature-based editing.
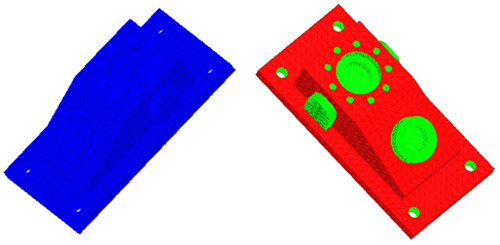
(Top) Input mesh with hole; (Bottom) Hole filled by red mesh patch.
Before reasoning with a mesh model, it is important to ensure that the model represents a solid. Holes (missing triangles) in the model must be corrected (filled) before any reasoning with the mesh model can be attempted. An automatic feature-preserving mesh hole-filling algorithm to repair CAD mesh model with arbitrary holes or gaps has been developed. The proposed algorithm fills the hole while maintaining curvature continuity across the boundaries of the hole. In addition, the algorithm can identify missing features such as edges or vertices and reconstruct these.
A composite surface patch bound by the boundary of the hole is first constructed and then tessellated to be in conformity with the original mesh to obtain the repaired mesh model. The input mesh remains unchanged in regions away from the holes so that any features in the input mesh are preserved. The reconstruction also works in the presence of holes with islands. Results from an implementation tested on various mesh models are presented.
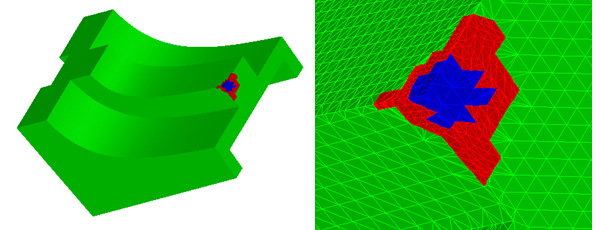
Input mesh model and segmented mesh model.
Feature-based editing is an example of local editing of a mesh model. An algorithm has been developed and implemented to recognize and extract volumetric features by directly clustering the triangles constituting a feature in a mesh model. Volumetric feature is defined to be a region of interest in the part that is associated with either ad dition or removal of a finite volume. The algorithm involves two steps – isolating features in 2D slices followed by a 3D traversal to cluster all the triangles in the feature. The mesh model is sliced to obtain 2D slices and the contour forming the slice is processed to identify 2D feature based on seed points and seed triangles. Seed points are the points where there is a significant and characteristic change in the contour. The algorithm therefore is not only able to isolate features in the mesh model but also able to identify the type of the potential feature from the 2D slice. In three-dimensional traversing, features are extracted by processing the triangles linked to a 2D feature. The main advantage of this approach is that processing of the three-dimensional mesh occurs only for the triangles associated with a 2D feature. Results from an implementation tested on a bench-mark model are shown above.
Topology and shape optimization
For more than a decade, Prof. Ananthasuresh’s group has been using topology optimization to generate conceptual designs for compliant mechanisms. Topology optimization of monolithic structure is equivalent to optimal distribution of material. Using the framework of calculus of variations, his group studied compliant mechanism design subject to manufacturability constraints, coupled multiphysics actuation, contact problems, etc. Solving more than one problem to optimally partition a given design domain enabled his group to obtain conjugate designs and conjoined structures. This became a method using which M.C. Escher-like designs that tile a space can be obtained enabling the exploration of aesthetic aspects of structural design.
Lately, the group is collaborating with industry partners in the pursuit of efficient designs with optimized internal geo metry of industrial components that will be made using additive manufacturing. Another ongoing project is using Isogeometric Analysis (IGA) for shape optimization. In IGA, the same NURBS representation is used for CAD and elastic analysis, thus saving the cost of transfer of data between CAD and analysis engines.
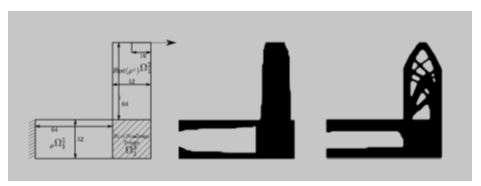
Topology optimization of conjoined structures compared to single-structure optimization.
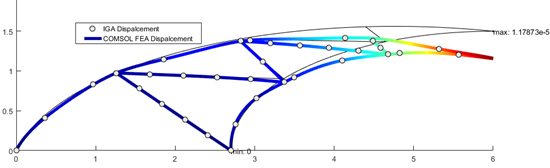
Isogeometric analysis (IGA) representation for multi-segmented structural shape optimization.