
Robotics and Autonomous Systems
Research in the area of robotics began with Prof. Ashitava Ghosal’s group in the late 1980s and continues to flourish today. The focus is on both foundational and applied aspects of kinematics, dynamics, control and motion planning by development, implementation and validation of associated theories and algorithms, Research and developmental activities in this area have been funded by various government agencies and private companies in India and abroad. A large number of students have been trained in this area at doctoral and master’s levels. The course “ME 246 Introductio n to Robotics” has been offered in the Department for many years by Prof. Ghosal. His research topics of past and present include multi-fingered hands, wheeled and walking robots, hyper-redundant snake robots, and nonlinear control. Lately, he has collaborated with Prof. Aditya Murthy’s group at the Centre for Neuroscience, IISc on motor learning and coordination.
Two other groups in the Department also have distinctive engagement in this field. Prof. G.K. Ananthasuresh’s group has developed a pipe-crawling robot, a haptic aid for cutting tissue, and a commercialized endoscopy simulator with haptics and graphics. Furthermore, on the basis of his work on SU-8 micro robots used in cell mechanics studies, he is involved in autonomous microrobotics with other colleagues in IISc. Recently, Prof. Ramsharan Rangarajan has started to investigate flexible robots wherein slender beams are used for manipulation tasks. He is also interested in employing deep learning for solving complex problems in path planning.
Structural mechanics approaches for designing flexible robots
Compared to conventional robots that typically consist of a combination of rigid bodies and actuators, flexible mechanisms offer clear benefits – simplicity in design, efficiency in operation and deployability across multiple length scales. Prof. Rangarajan’s group is envisioning ways to con trol tendon-driven flexible robotic arms using structural mechanics models. In addition to intended applications in designing space structures and precision manipulators, a crucial aspect of this endeavor is examining the benefit of adopting a mechanics-based approach for controlling robotic arms rather than relying on mechanics-agnostic statistical training methods.
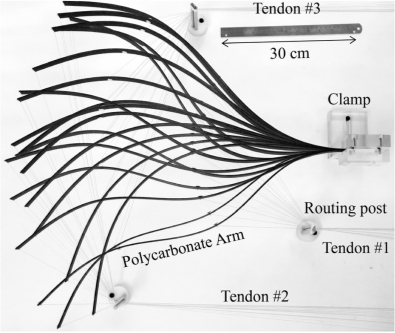
Manipulating a tendon-driven flexible polycarbonate arm by controlling the tensions in each tendon.
Ongoing work in Rangarajan’s group considers the problem of controlling shapes of tendon-driven elastic arms as an inverse problem of load optimization. The images shown alongside here are practical examples where an elastic arm attached to a pair of tendons is manipulated to achieve a variety of user-specified shapes by controlling just the tensions in the tendons. The benefit of combining rigorous mechanics principles and geometrically nonlinear models with practical design considerations and operational constraints lies in the list of potential applications, which range from precision instruments for medical applications, inspection in cluttered environments, to the design of assistive exoskeletal devices.
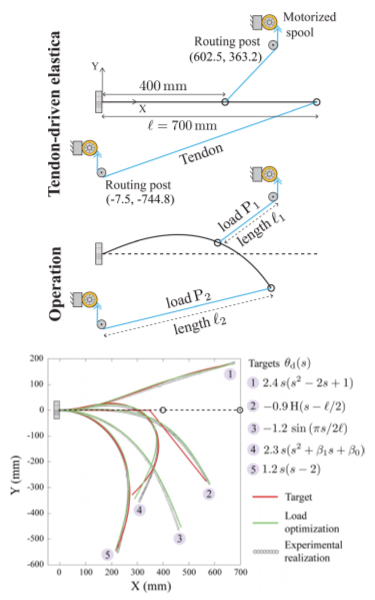
Demonstration of mechanics-based shape control in a flexible beam.
Multi-fingered hands
Parallel manipulators have been an active topic of research in Prof. Ghosal’s group. In the past, several new results on Gough-Stewart platform manipulators were obtained. In particular, the singularity surfaces of a semi-regular Gough-Stewart platform manipulator were obtained in terms of simple polynomials. The singularities could be used to design six-component force-torque sensors where measurement sensitivity for desired components could be enhanced by choosing an appropriate near-singular Gough-Stewart platform. The skill sets and expertise attained over the years on analysis and design of parallel manipulators were recently used in two novel applications.
 Figure on the left shows a human hand grasping a ping-pong ball with three fingers. The ball can be manipulated (oriented and positioned in 3D space) by moving the fingers. It is intuitively clear that a small marble or a big basket ball cannot be manipulated too much and t here may be an optimal-sized object for a given hand.
Figure on the left shows a human hand grasping a ping-pong ball with three fingers. The ball can be manipulated (oriented and positioned in 3D space) by moving the fingers. It is intuitively clear that a small marble or a big basket ball cannot be manipulated too much and t here may be an optimal-sized object for a given hand.
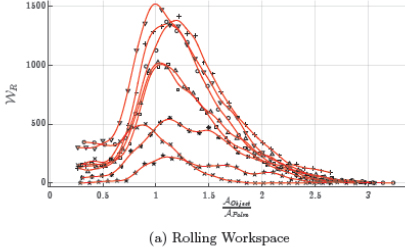
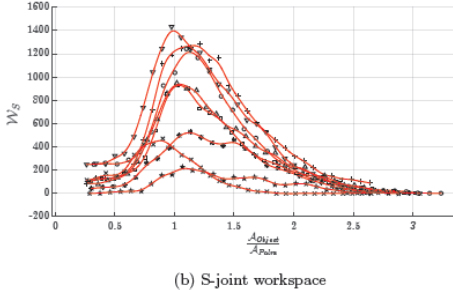
In a recent work, it has been demonstrated that the maximum position and orientation workspace is obtained when the cross-sectional area of the grasped object is approximately equal to the area of the palm of the hand. When rolling without slipping is allowed, the well-conditioned workspace is 1.2 to 1.5 times larger. This novel result has been obtained using a Monte Carlo based approach to obtain the volume of the well-conditioned workspace of a three-fingered parallel manipulator modeling the grasped object with three fingers. This is shown in the following two plots (Y-axis is the workspace, X-axis is the ratio of palm area to cross-section area of the grasped object) for rolling without slipping and when no rolling is allowed.
Automated sun-tracking devices
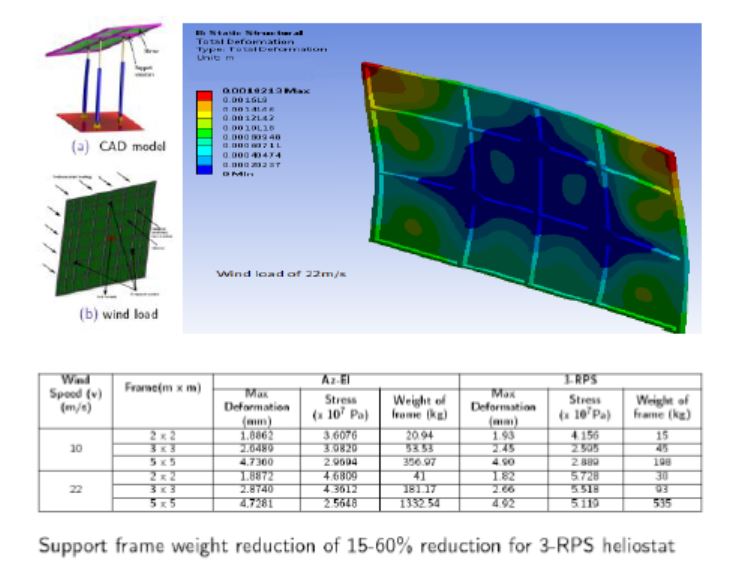
Two novel three Degree-of-freedom (DOF) parallel manipulators have been developed to track the sun for concentrated solar thermal power systems. The concept of concentrating incident solar energy in a Central Receiver Tower (CRT) system and then converting the energy into electricity is well established and has the advantages of improved conversion efficiency and its ability to store the energy in thermal form as opposed to using batteries. The key challenge in a CRT system is to achieve low cost, efficient and accurate tracking (pointing accuracy of ~ 2-4 mrad) of the sun at all times of the day and during all days in the year by the several hundreds of heliostats used in the field at a given latitude and longitude. The existing approaches of azimuth-elevation (Az-El) and target-aligned (T-A) (also known as spinning-elevation) use two actuators (DC motors and/or linear actuators) in series and typically require use of expensive speed reducers.
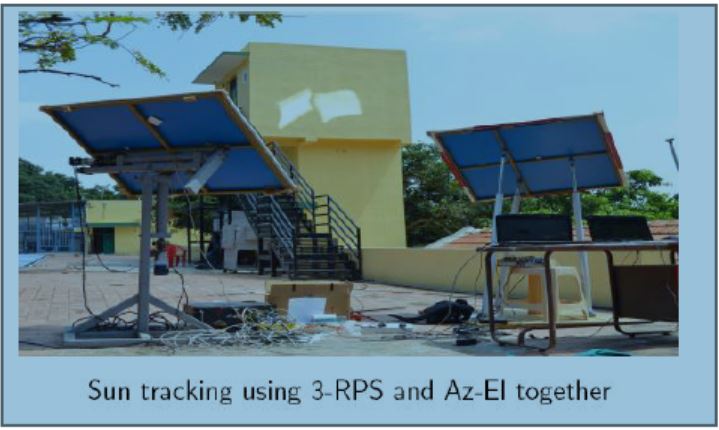
Researchers in the lab have proposed, analyzed and developed two different 3-DOF parallel manipulators, namely the 3-RPS and the 3-UPU wrist, as heliostats for tracking the sun in CRT systems. Two of the inherent properties of the parallel mechanisms are accurate positioning of end-effector (mirror) and high load-carrying capacity. These serve as the key motivation to use parallel manipulators for sun tracking. It was shown using finite element analysis that the structural weight of the heliostats could be reduced to 15–60 % when compared to conventional mechanisms, thus leading to considerable savings. Additionally, the use of only linear actuators does not require use of expensive speed reducers. The following figures show the results from finite element study with a 3-RPS system for different wind loading and the savings in weight. Snapshots of the 3-RPS based heliostats and the conventional Az-El heliostat tracking the sun are shown. A photograph of the e-reconfigurable, either Az-El or T-A heliostat is also shown.
The above research has been published in several journal and conference papers – the work on multi-fingered hands appeared in Trans. ASME, Journal of Mechanisms and Robotics, Vol. 10, No. 4, pp. 041003 (2018) and the work on sun tracking using parallel manipulators appeared in Solar Energy, Vol. 157, pp. 672-686 (2017) and Mechanism and Machine Theory, Vol. 119, pp. 130-141 (2018).

Hyper-redundant and snake robots
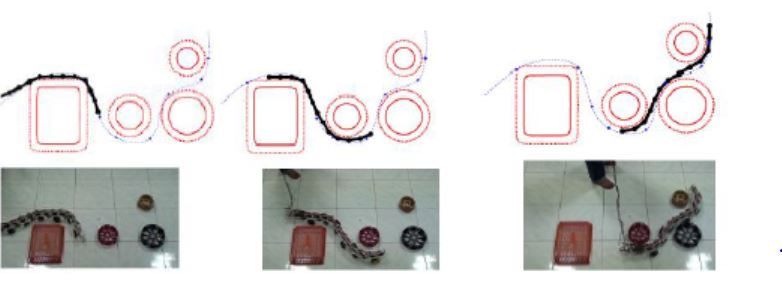
Hyper-redundant and snake robots are finding increasing use as search and rescue robots and in surgery. Over the last several years, fast and robust algorithms have been developed for real-time motion planning of hyper-redundant and snake robots. The algorithms are based on minimization of Cartesian velocities and use of advanced calculus of variati lon tools. It has been shown that, in the absence of obstacles in the workspace, the ‘tail’ of a link of a hyper-redundant robot follows a classical tractrix curve and the motion of the links attenuate as one goes down the chain. This results in a more ‘natural’ motion of the robot as compared to existing approaches. In the presence of obstacles, the motion of the link is away from the obstacles and therefore the obstacles are avoided. An experimental prototype snake robot with 12 links validates the developed algorithms and simulation results.
Snapshots of the motion of the snake robots is shown below. Top figure shows simulation results and bottom figure shows experimental results.
The results of the research were published in Trans. ASME, Journal of Mechanisms and Robotics, Vol. 9, pp. 041010-041010-9 (2017), Computer-Aided Design, Vol. 75-76, pp. 13-26 (2016), and Mechanism and Machine Theory, Vol. 67, pp. 64-76 (2013).
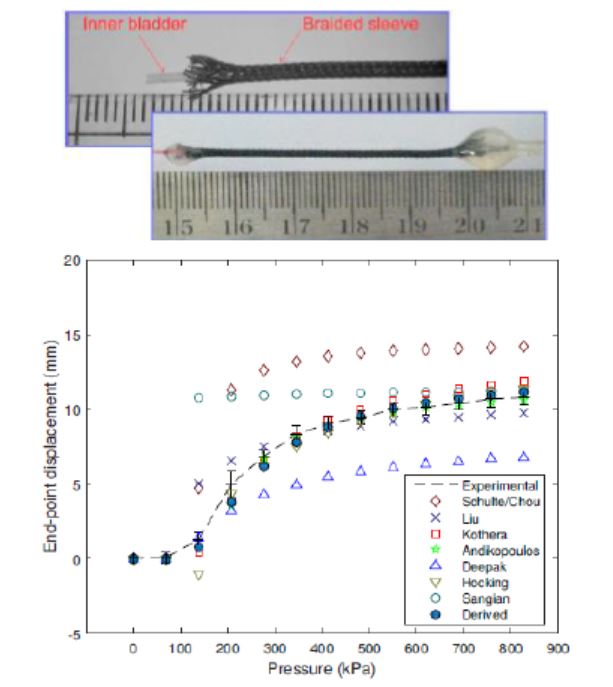
Over the last few years, extensive efforts have been invested towards the development of miniaturized pneumatic actuators. The Miniaturized Pneumatic Artificial Muscles (MAPMs) consist of a soft silicone tube of braided with stiffer nylon wires. When the MPAMs are pressurized, they contract upto 20% of their length which can be used for independently actuating endoscopic catheters. Figure below shows the developed MPAMs with diameter of 1.2 and 1.5 mm. A new static model of the MPAM has been developed and as shown in figure below, it predicts experimental results more accurately that existing models in literature.
The developed MAPMs have been used to develop independently actuated catheters for endoscopy. A schematic of the independently actuated catheter in relation to the endoscope end is shown below. The fabricated prototype is also shown.
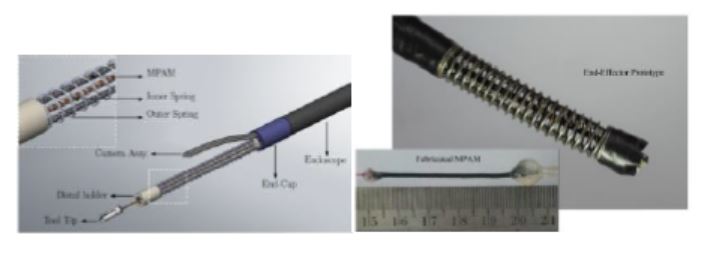
The developed end-effector can be positioned arbitrarily in a hemispheric region of approximately 2.5 cm radius and algorithms have been developed to control the tip motion using a joystick. The results of the research have appeared in prestigious Trans. of ASME, Applied Mechanics Reviews, 2018, doi: 10.1115/1.4041660 and in various international conferences.
Motor learning and the role of variability
The number of joints in a human arm is more than what is required for reaching the desired point in three-dimensional space. How the nervous system controls and utilizes this redundancy is an unresolved problem in motor control. Additionally, one can pose the problem of how the reaching task is achieved reliably and repeatedly in the presence of motor variability. In a work done with collaboration with Centre for Neuroscience, IISc, redundancy and its effect on motor learning was investigated. It was shown that some part of motor variability arises out of redundancy and greater uses of the latter lead to faster learning across subjects. This phenomenon was observed in force-field and visuomotor perturbations in a dominant hand and a non-dominant hand. Interestingly, the observed differences in the redundancy uses between the dominant and non-dominant hands suggests that the redundancy is actively controlled by the nervous system.
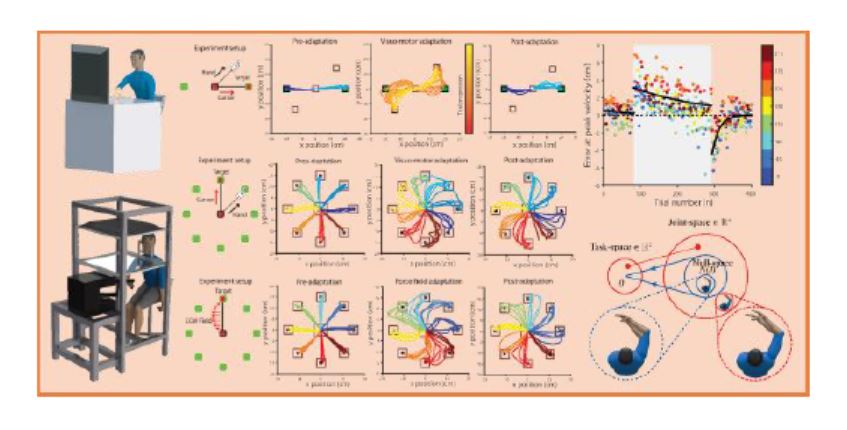
Figure above shows the experimental setup (left panel), the trajectory of the hand when there is no perturbation, with perturbation and when the perturbation is removed for different reaching tasks (middle panel), and motor learning (right panel). The right most bottom figure shows graphically the concept of redundancy.
The results provide experimental support for the hypothesis that the exploration of redundancy aids in learning and that the redundancy component of the motor variability is not noise. More details of the experiments and results are available in a paper published in the Proceedings of the National Academy of Science, 113 (50), pp. 14414-14419 (2016).
Mobile and walking robots
A longstanding topic of research in the robotics area has been Wheeled Mobile Robots (WMRs). Extensive work has been done in the past on development of WMRs with omni-directional wheels, and modeling and analysis of slip in WMRs on flat and uneven terrains. Slip in WMRs is undesirable due to wastage of energy and localization errors with on-board odometry. Recently, novel WMRs which can negotiate uneven terrain with minimal slip have been proposed, modeled and analyzed. It has been shown that such a three-wheeled mobile robot requires a two Degree-of-freedom (DOF) suspension on uneven terrain. Several novel two DOF suspensions have been studied both in terms of simulations and experimental validation. One such protype three-wheeled mobile robot with torus-shaped wheels and suspension containing two four-bar mechanisms in two planes is shown below.
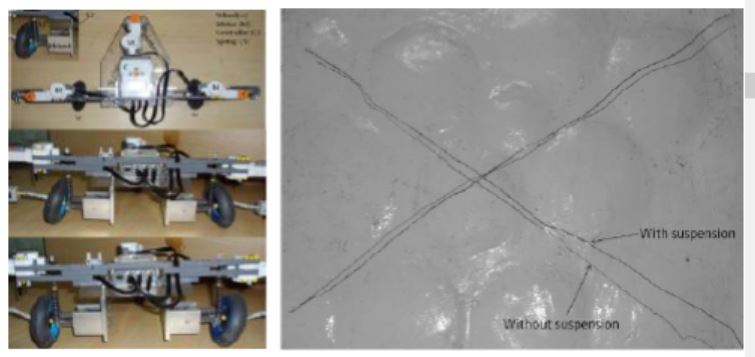
The trajectories traced by the centre of the WMR with and without suspension demonstrated that the WMR can negotiate uneven terrain with less slip. The research on wheeled mobile robots have appeared in Mechanism and Machine Theory, Vol. 93, pp. 83-97 (2015) and in Mechanics Based Design of Structures and Machines, Vol. 43(4), pp. 466-486 (2015).
Very recently, research has also been initiated on walking robots in collaboration with the Robert Bosch Centre for Cyber Physical Systems at IISc. A four-legged robot has been fabricated and it has been demonstrated that the robot can learn to walk on its own using reinforcement learning techniques.
An external pipe-crawling robot
To meet the need for automated inspection of a bundle of pipes in hazardous conditions in Bhabha Atomic Research Centre (BARC), Mumbai, a project sponsored by them was taken up by Prof. Ananthasuresh’s group. An external pipe-crawler was required that can move on the pipes amidst a bundle of them with narrow gaps in between. By emulating inch-worm motion, a pair of ring-actuators connected by a longitudinal actuator and a spring, a compact pipe-crawling robot was designed and made. It contained a Shape-Memory Alloy (SMA) actuated compliant mechanism that converts circumferential motion to radial motion. It followed the principle of alternate gripping and releasing of two ring actuators with the intermediate steps of longitudinal actuation and spring action to move along the pipe.
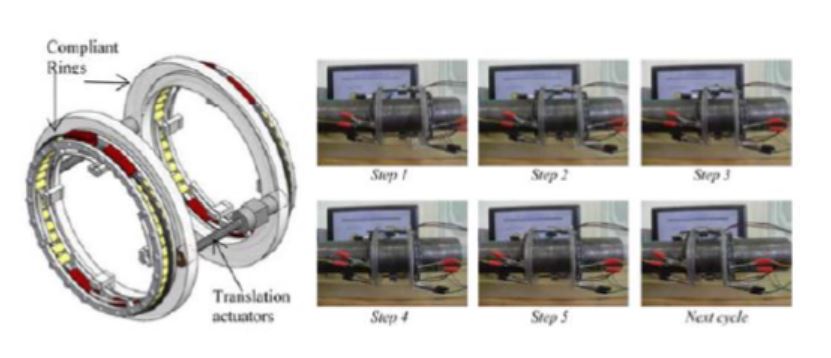
A compact external pipe-crawling device consisting of a pair of compliant ring-actuators driven by SMA wire; prototype is under testing.
Haptic robotics
Out of necessity that arose in biomedical applications pursued by Prof. Ananthasuresh, two haptic devices were developed by his group. The first one was a device to cut tissue and the other one for an endoscopy simulator. In the tissue-cutting device, the aim was to cut only the soft tissue and not the hard tissue. This was achieved with the help of a compliant mechanism that retracts automatically when hard tissue is encountered beyond a certain pre-set threshold value. The same device also acted as a force sensor for master-slave control with haptic feedback. In this project, the commercially available Phantom robot was used. For an endoscopy simulator a novel haptic device was designed and built in-house (see Biomechanics and Biomedical Devices research area). It has three degrees of freedom and uses novel mechanisms that provide realistic force feedback, as confirmed by gastroenterologists. This haptic device is now commercialized by an IISc start-up, Mimyk.
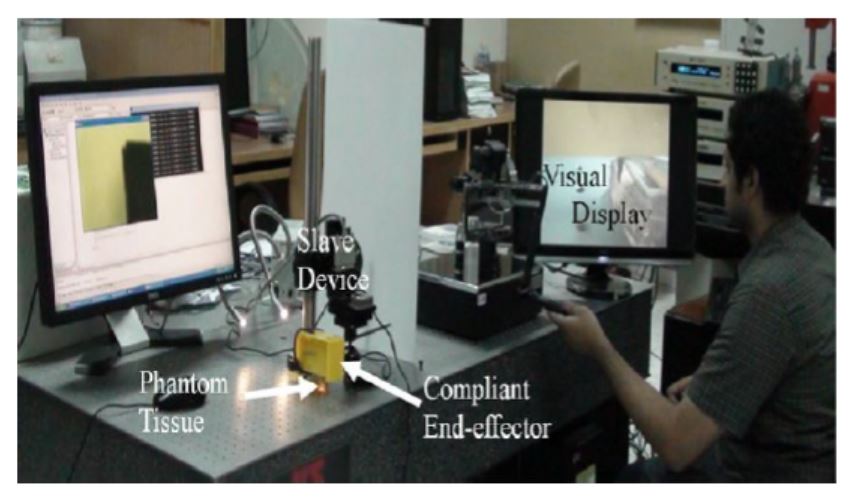
A haptic device developed for cutting tissue using a compliant end-effector.
Microrobotics for cell mechanics studies
Emulating in vivo conditions in cell culture is much needed in biological studies. Creating a 3D environment for cells is often accomplished by gels and nano-fibrous scaffolds.
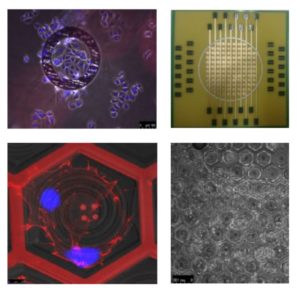
SU-8 microrobots with cells on them; an array of planar micro electromagnetcs; and active scaffolds with cells on them.
Ananthasuresh’s group is exploring active scaffolds wherein the substrate on which cells grow can be deformed and moved autonomously as desired. The basis for this work is microfabrication of SU-8 microstructures embedded with magnetic nanoparticles and creating localized magnetic fields using an array of planar micro electromagnets. Vision-based force-sensing is also incorporated into the active scaffolds using suitably designed compliant mechanisms. This work is also extended to growing cells on autonomously moving SU-8 micro robots for a few applications in bio- and biomedical domains.