Vibration, Acoustics and Control
Research in vibrations and acoustics was started by Prof. M.L. Munjal almost fifty years ago in the Department. The objective was to design industrial products for quietness, with a strong focus on automotive mufflers. Computational and experimental work was carried out in the Ducts and Mufflers Laboratory in the Department leading to a commercial software that can predict the performance of industrial automotive mufflers. In order to popularize technical acoustics for education and research, Prof. Munjal carried out industrial consultations and government projects, organized numerous workshops across the country, and offered continuing-education programs for college teachers. He was involved at the highest levels of government policy-making to bring forth noise-control norms across the country. It was only natural for him to register his vast expertise in a comprehensive book titled ‘Acoustics of Ducts and Mufflers’, published by John and Wiley. In 1999, he was joined by Prof. Venkata Sonti, with a background in structural acoustics. Prof. Sonti and his students conduct analytical/semi-analytical studies on well-posed sound-structure interaction problems. Initially starting with linear problems, Prof. Sonti has broadened his interests to include nonlinear structural acoustic systems. More recently, there has been an energy initiative, wherein a part the objective is to understand the rotor dynamics of high-speed shafts (~ 70,000 rpm). Subsequent to these studies, research is expected to extend to the fluid-structure interaction domain.
Research activities in control in the Department have been marshalled by Prof. Ashitava Ghosal for close to three decades now, aligned with his longstanding interest in the field of robotics. He has served as instructor for the course “ME 240 Dynamics and Control of Mechanical Systems” for several years. The scope of control research was expanded to new regimes in 2018 when Prof. G.R. Jayanth joined the Department as Associate Faculty. Prof. Jayanth works on precision motion control, with applications in metrology and robotics, at the micrometer and nanometer length scales. Towards this end, his group is investigating development of new measurement techniques, probes, actuation techniques, and advanced control.
Studies on linear sound-structure interaction
In sound-structure interaction problems, the dispersion equation gets coupled through coupling parameter that is typically small. Solutions to this dispersion equation are the coupled wavenumbers that propagate in the fluid as well as the structure. Prof. Sonti’s group has developed closed-form expressions to these coupled wavenumbers in systems like flexible orthotropic cylindrical waveguides carrying an acoustic fluid. Perturbation methods have been used at arriving at these results. Once closed-form formulae are available, the governing physics is much more amenable to examination.
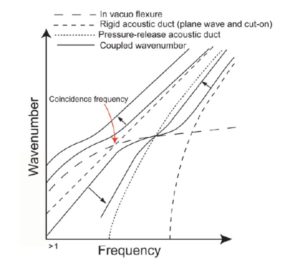
A schematic of uncoupled and coupled waves in a waveguide.
Studies on nonlinear sound-structure interaction
Studies in nonlinear sound-structure interactions, so far in the literature have included the nonlinearity in only one of the systems: either the structure or the acoustic medium. Largely self-mode interactions have been studied whereas cross-mode interactions have not received due diligence. The acoustics group in the Department is studying propagation of waves in waveguides where the waveguide wall is flexible and governed by a nonlinear equation. The waveguide carries a nonlinear acoustic fluid. The nonlinearity considered is weak so that asymptotic methods can be used. A set of waves is initiated and their amplitude modulation and other interesting phenomena are studied. This is the first instance where both the structure and the fluid are nonlinear. So far, for self-mode interactions they have obser ved what the literature has predicted for simpler systems – amplitude modulation governed by the nonlinear Schrodinger equation (NLSE), the occurrence of bright and dark solitons.
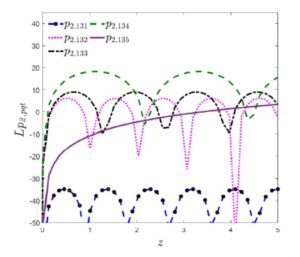
Beating and resonance in a nonlinear rigid cylindrical waveguide.
They are currently looking at cross-mode interactions and resonances. They have found that cross-mode resonances (i.e., two different modes solving the homogenous equation) are very rare, however, they have discovered a near-resonance beating phenomenon of modes. Also, whether phase-speed matching is a requirement for cross mode resonances is a question to be addressed. Along these lines, they are investigating different systems/geometries (rectangular, cylindrical, plates and membranes); their behavior is slightly different from one another. In the near future, the plan is to look at specific solutions to the NLSE. So far studies have been for a harmonic steady-state excitation. As a next step they intend to look at transient phenomena in these waveguides. There is hardly any literature available on this topic.
Structural acoustics of perforated panels
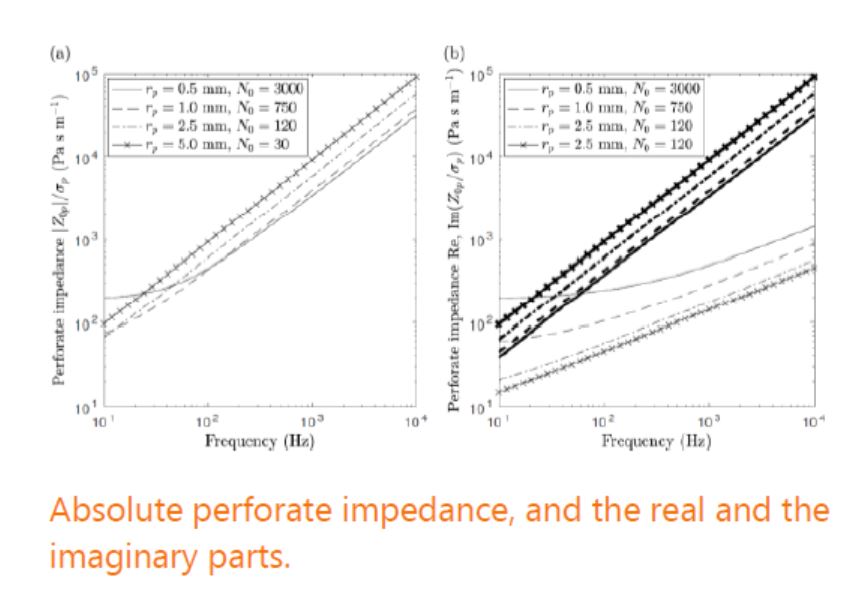
Prof. Sonti’s group is modeling sound radiation and transmission through perforated panels set in rigid baffles using semi-analytical methods (wavenumber transforms). This is a fully coupled formulation. The model also accounts for resonance shifts in the panel due to the perforations. The panel and the baffle are differently perforated which brings about an integral equation that can be solved numerically. The metrics of interest are radiation efficiency and transmission loss. One set of investigations involves analytical methods fairly till the end with the final integral computed numerically. More recently, they have obtained closed-form formulas for the modal coupling coefficients using contour integrals with branch cuts. There is now scope to understand the fluid loading phenomenon in panel radiation problems by carrying out further studies.
Studies on sonic boom
Sonic boom near a caustic is governed by the Nonlinear Tricomi Equation (NLE). The NLE is a challenging equation for both numerics and analytical methods. Currently the acoustics group is looking at meshless methods for solving this equation. Also, as there is an intrinsic small parameter, efforts are invested to solve the equation using asymptotic methods.
Probing systems for nano-scale imaging, characterization and manipulation
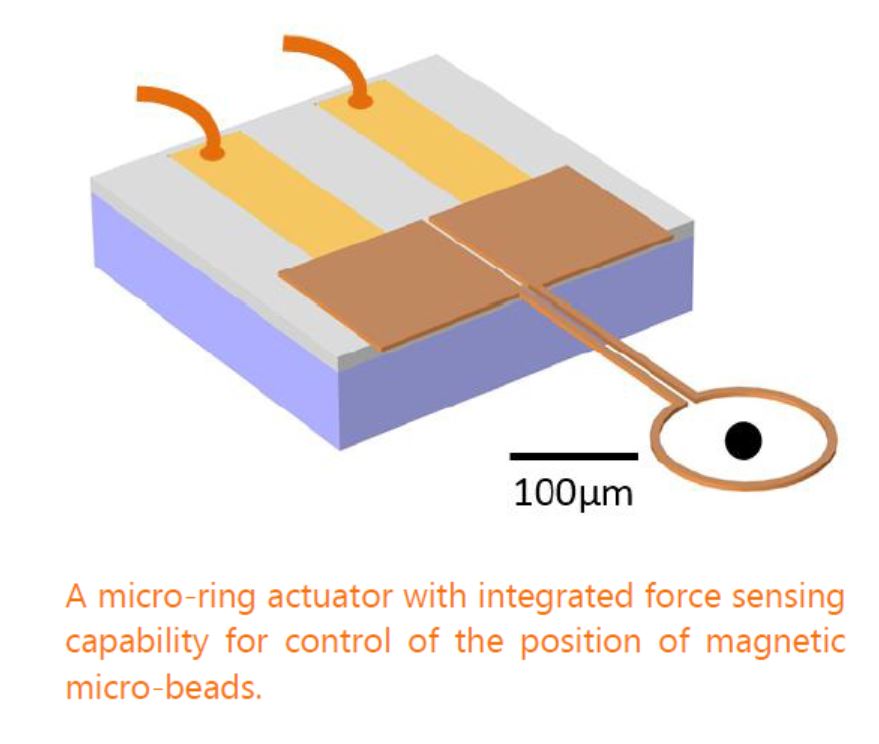
The objective of research here is to develop advanced probing systems for nanoscale metrology and manipulation that address the issues of imaging 3D features, improving the speed and portability of atomic force microscopes. Prof. Jayanth’s group has developed a scanning probe system whose tip can be actively oriented about two independent axes by angles as large as ±90˚ and displaced in a co-located manner in 3D. A measurement system that enables measurement of 3D tip-sample interaction forces has also been developed. Accessing and subsequent imaging of re-entrant (concave) features and side-wall features of nano-scale samples have been demonstrated. The group has also developed a magnetic tweezers system with force sensing capability, where the position of a micro-magnetic bead is sensed and controlled by a current-carrying compliant micro-ring. They have demonstrated that it is possible to employ parametric excitation to trap and manipulate the bead in 3-D, and to sense its position along one axis. This enables control of untethered magnetic micro-beads that may be partially or completely hidden from view.
To address the poor portability of commercial atomic force microscopes, an AFM probing system with integrated 3D scanner has been developed. When integrated with piezo-resistive deflection measurement, the AFM scan head reduces in volume to just the size of an AFM probe-chip, viz., a few mm3. In contrast the volume of conventional scan-heads is over 10 cm3. To address the low speed of conventional AFM, a high-speed AFM system is being developed. A novel magnetically actuated probe has been designed and fabricated, which can ideally achieve a bandwidth of over 450 kHz and a displacement range of about 500 nm. An FPGA-based high-speed control system has also been developed and experimentally demonstrated to achieve imaging rates of 1.25 frames/s.
Finally, since the tips of AFM probes get blunted with repeated use, a module that facilitates automated exchange of tips in an AFM is being developed. Uniquely, the developed system enables exchange of tips in-situ and can be retrofitted into conventional AFM. The replaceable tip has been demonstrated to image samples, both in contact mode and in tapping mode, with performance similar to conventional AFM.
Measurement and control of precision motion
Our research has addressed development of systems to measure multi-axis motion, and high-speed nano-positioners. In relation to measurement, we have developed an optical beam deflection system to measure in-plane linear motion by integrating a curved reflector with the motion stage. Uniquely, the system can simultaneously measure multi-axis transient and steady-state response of both MEMS and macro-scale stages. Development of a 5-axis measurement system for simultaneous measurement of 5-degree-of-freedom motion of an object is currently in progress.
In relation to nano-positioning, a two axis in-plane piezo-actuated nano-positioner has been designed, fabricated and integrated with the optical beam deflection-based in-plane measurement system. The fundamental limit of achievable speed of flexure-guided nanopositioners for a specified tra vel range has been derived by employing a simple reduced-order model. Experimental validation of the same is currently in progress.
Nonlinear dynamics and control theory
Efforts in this area have been aimed at the application of well-known tools in nonlinear dynamics, such as the method of multiple scales and Floquet theory, to obtain results in nonlinear control. One such result obtained over several years is that for small controller gains, a robot controller implementing the well-known proportional-integral-derivative (PID) algorithm or a model-based control law cannot track a desired trajectory. In order to track a desired trajectory asymptotically, the controller gains need to be sufficiently large. This goes against the established norm that a PID controller or a model-based controller is asymptotically stable for all positive controller gains. Results from this research have been published in several papers in the Trans. of ASME, Journal of Computational and Nonlinear Dynamics and in the past in IEEE Conference on Robotics and Automation and in the International Journal of Robotics Research.
Design, analysis and fabrication of Micro-Electromechanical (MEMS) devices
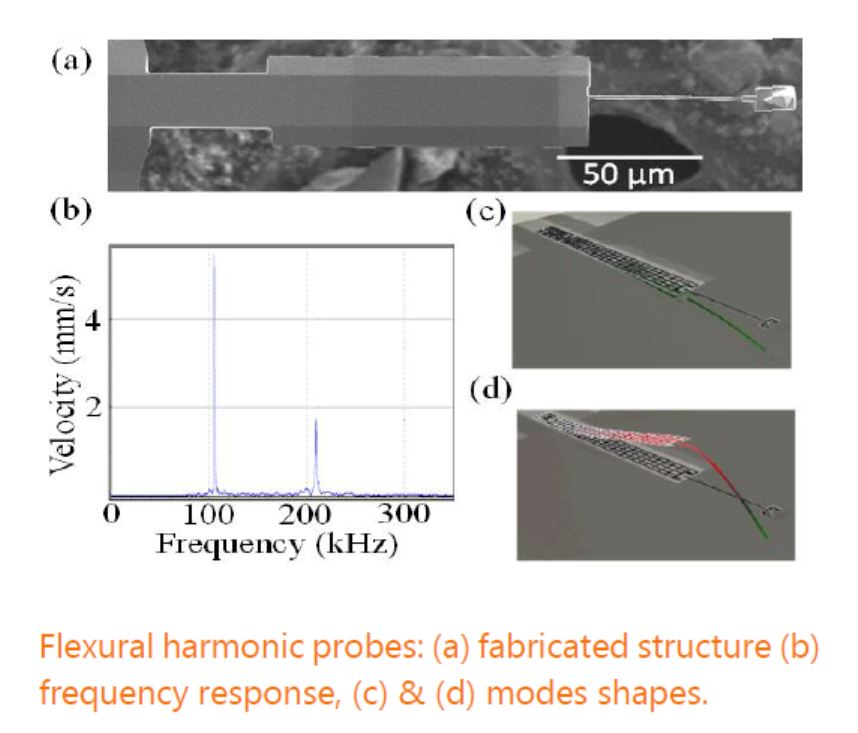
Our research in this area has focused on design, analysis and fabrication of MEMS force sensors, and MEMS switches. We have developed a general strategy to design cantilever probes that possess a specified set of eigenfrequencies. Such probes find applications in multifrequency atomic force microscopy, wherein the tip-sample forces possess harmonic componentss at multiple frequencies. Torsional and flexural probes with eigenfrequencies in the ra tio 1:2:3 have been designed and fabricated.
We have investigated the design and analysis of MEMS switches, which in practice possess coupled multi-axis dynamic response. A simple fourth-order system model was developed to explain tilted landing in RF MEMS switches and to derive the limit of fabrication tolerances that avoid tilted landing.